Frontiers Gait Optimization Method for Humanoid Robots Based on

Applied Sciences, Free Full-Text
Frontiers Lower limb exoskeleton robot and its cooperative
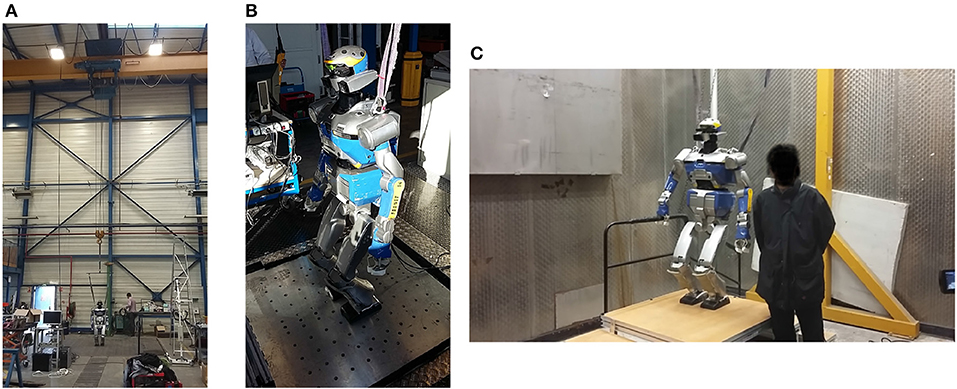
Frontiers Benchmarking the HRP-2 Humanoid Robot During Locomotion
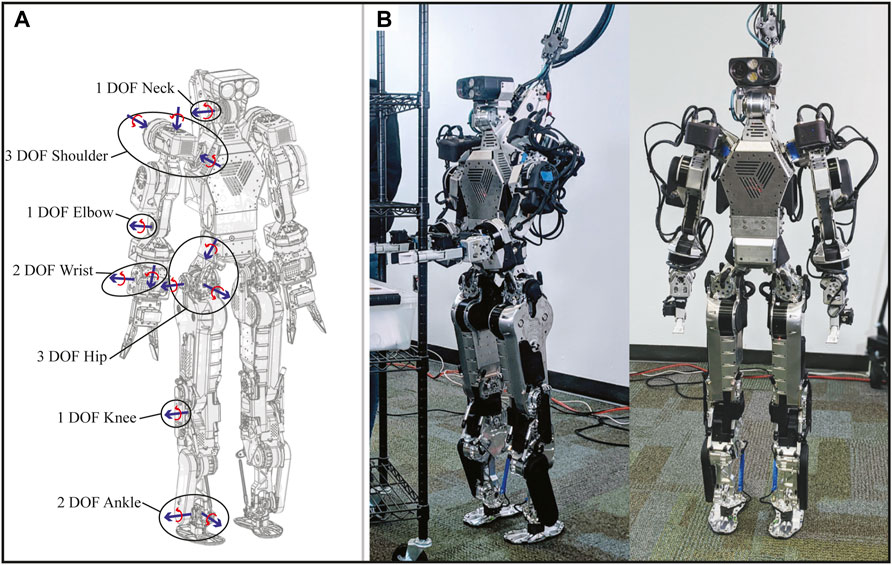
Frontiers Control and evaluation of a humanoid robot with

Applied Sciences, Free Full-Text

How to choose the most natural path for a humanoid robot? The
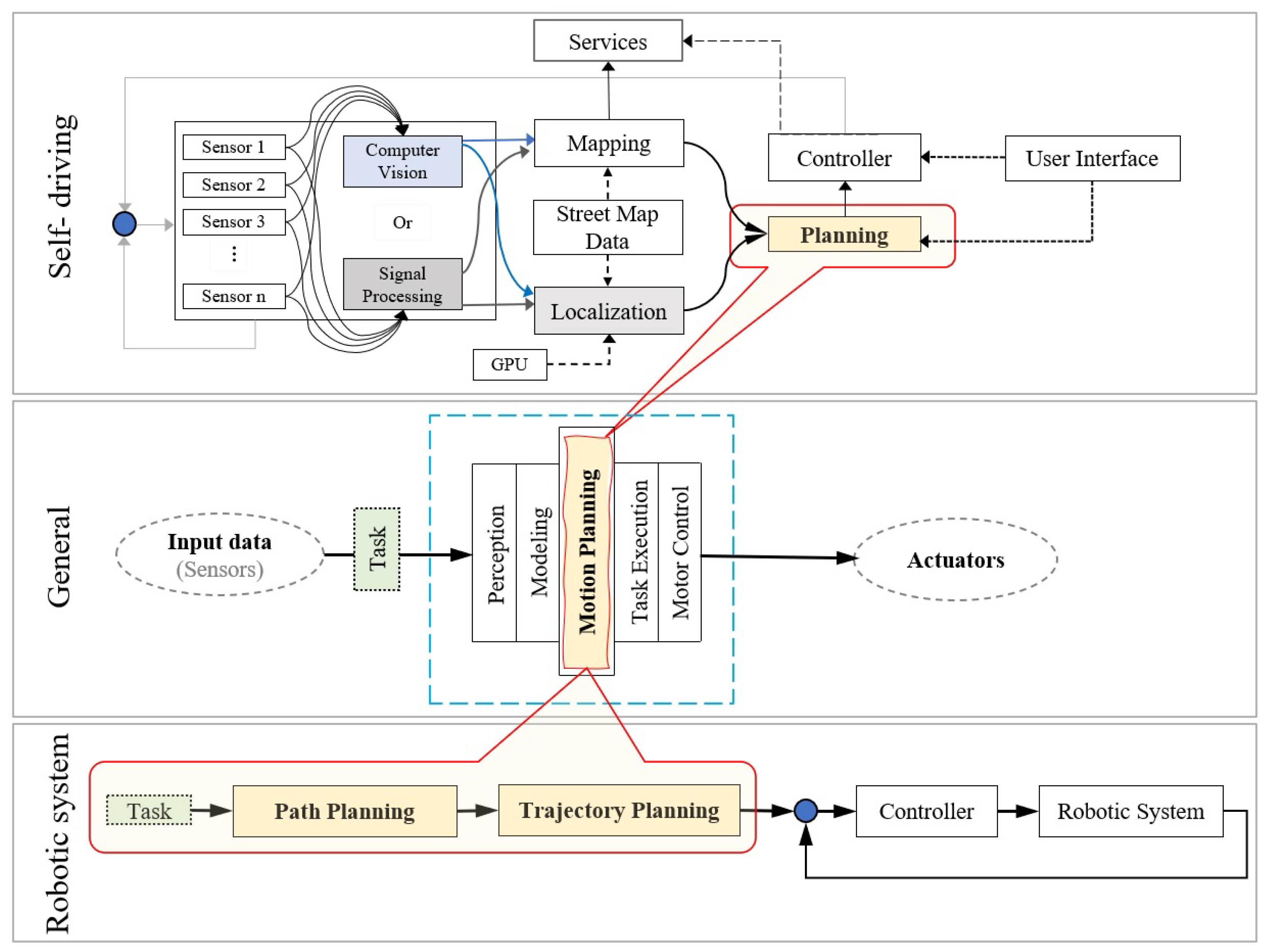
Machines, Free Full-Text
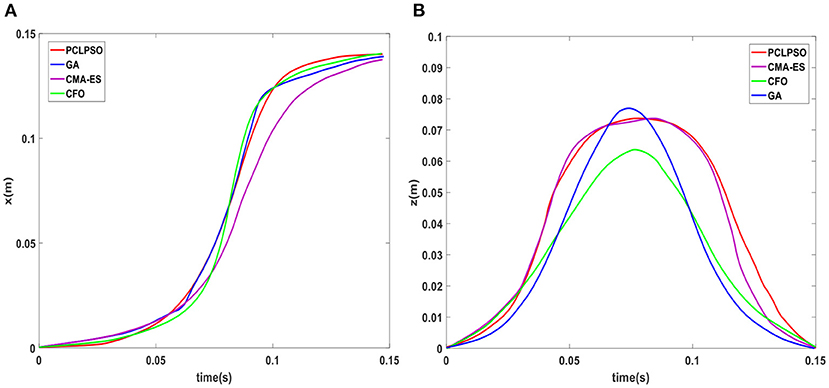
Frontiers Gait Optimization Method for Humanoid Robots Based on
Frontiers Simulation Analysis of Impulsive Ankle Push-Off on the

Perception for Humanoid Robots
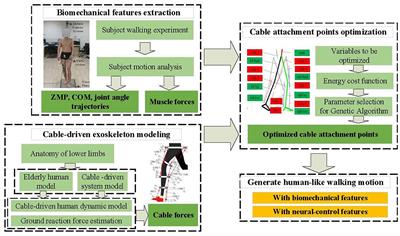
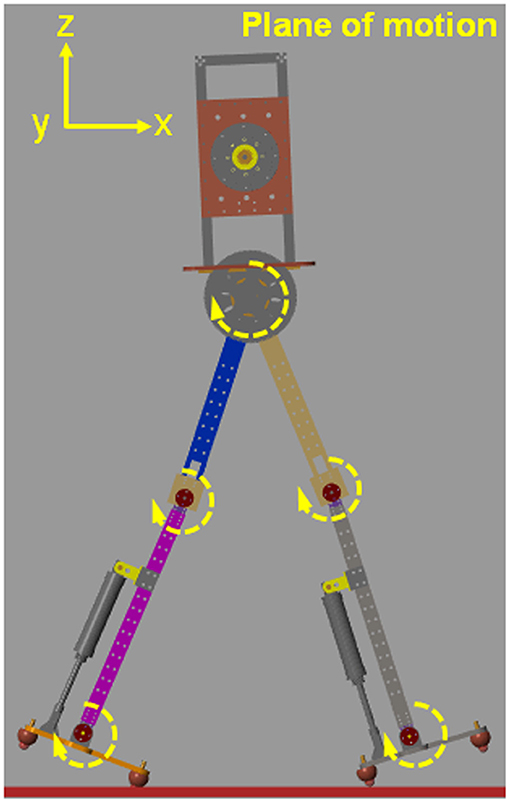
Frontiers Towards Human-like Walking with Biomechanical and
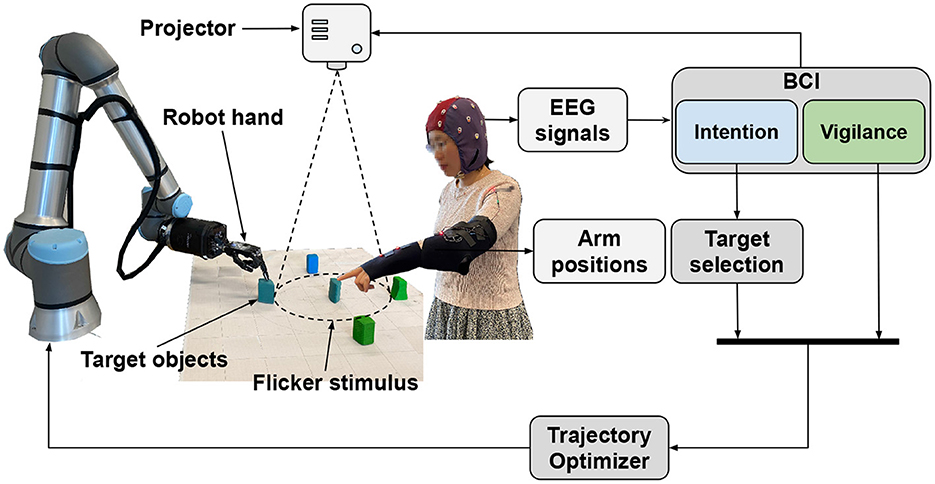
Frontiers Coordinating human-robot collaboration by EEG-based

PDF) Push Recovery of a Position-Controlled Humanoid Robot Based
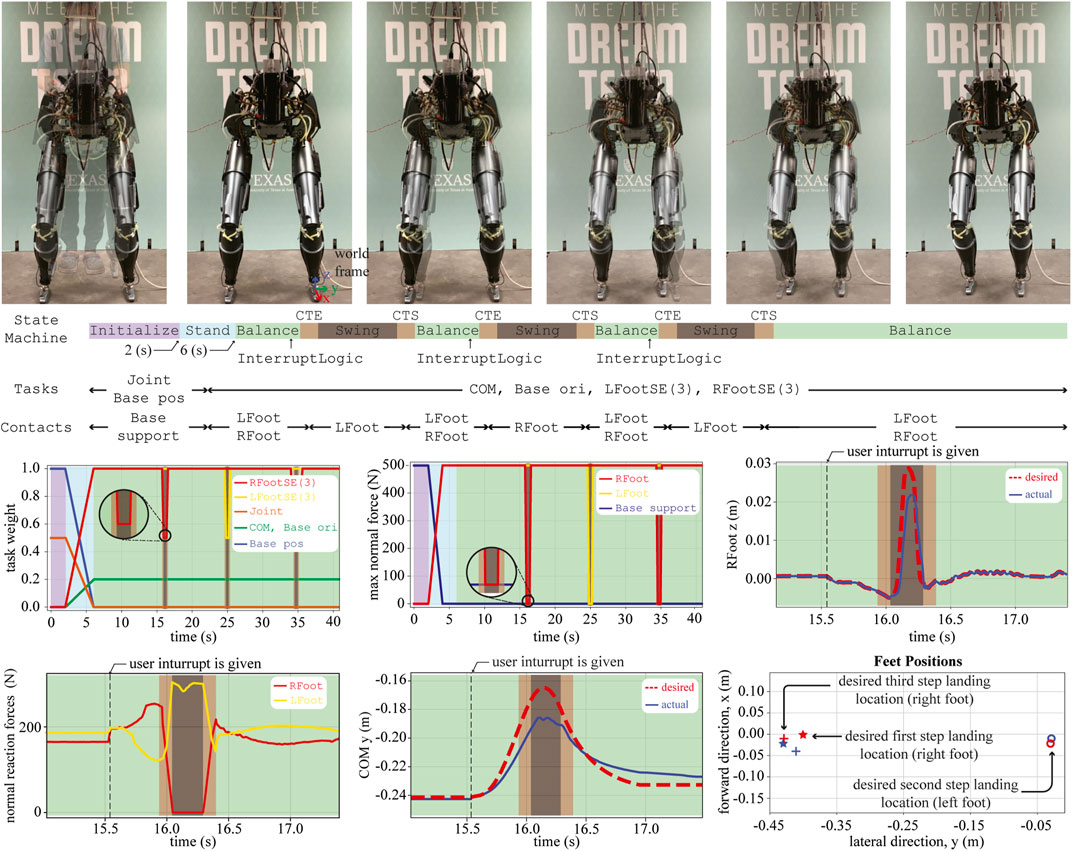
Frontiers Versatile Locomotion Planning and Control for Humanoid
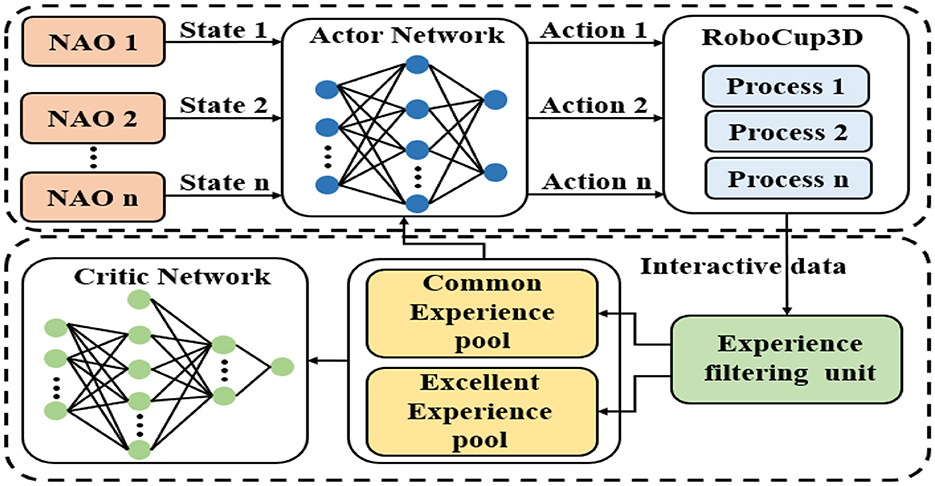
Frontiers A parallel heterogeneous policy deep reinforcement