Drones, Free Full-Text
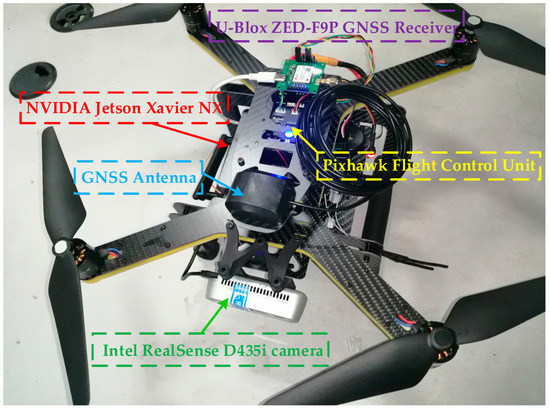
Self-localization and state estimation are crucial capabilities for agile drone autonomous navigation. This article presents a lightweight and drift-free vision-IMU-GNSS tightly coupled multisensor fusion (LDMF) strategy for drones’ autonomous and safe navigation. The drone is carried out with a front-facing camera to create visual geometric constraints and generate a 3D environmental map. Ulteriorly, a GNSS receiver with multiple constellations support is used to continuously provide pseudo-range, Doppler frequency shift and UTC time pulse signals to the drone navigation system. The proposed multisensor fusion strategy leverages the Kanade–Lucas algorithm to track multiple visual features in each input image. The local graph solution is bounded in a restricted sliding window, which can immensely predigest the computational complexity in factor graph optimization procedures. The drone navigation system can achieve camera-rate performance on a small companion computer. We thoroughly experimented with the LDMF system in both simulated and real-world environments, and the results demonstrate dramatic advantages over the state-of-the-art sensor fusion strategies.

drone-mapping-ebook - GeoNadir
Drones, Free Full-Text

Home - Uav Flight Map
Drones, Free Full-Text

The 4 Best Drones for Photos and Video of 2024

The best drone 2024: top aerial cameras for all budgets

What Is a Drone?

1,034 Learning Resource Centre Images, Stock Photos, 3D objects

Camera Drones for sale in Georgetown, Guyana, Facebook Marketplace
Drones, Free Full-Text

Drones Free Full-Text Distance-Based Formation Control For Fixed

Drones, Free Full-Text
Drone Images - Free Download on Freepik







